数日前にDRV8825もAliExpressから届いており、CNCマシンが完成したらAitendoで購入したA4988と交換する予定です。ついでに、CNCシールドの新しいバージョン3.5も注文しました。いまなら、AliExpressでも$20以下で買えるようです。CNCシールドv3.5(V3.1から)ではgrbl0.9のピン配列に対応しているため、そのままPWM端子を使ってスピンドルやレーザーモジュールの可変出力制御できます。V3.0の場合grbl0.9のピン配列に対応していないため、Z+とZ-がPWMピン、SpnEn端子がZ+(あるいはZ-)。Ebayから購入すれば、最新版V3.5.1みたいですね。
*CNCシールドV3.0とV3.1以上(最新版V3.51)の違いについてはこちらへ。
主に制御用の電気系統については以下が必要:
・grbl0.9jファームウェアをアップロードしたArduino Uno(方法はこちらへ)
・CNCシールド(CNCシールドV3.0とV3.1以上の違いに注意)
・ステッピングモータードライバ(A4988/DRV8825など)
・ステッピングモーター(各XYZ軸)
・XYZ軸用リミットスイッチ(マイクロスイッチなど)
・スピンドル用TTL端子付きドライバ(あるいはレーザー用ドライバ)
・電源(ステッピングモーター用):DC24V/5A以上
・非常停止ボタンや各種スイッチ類(要配線)
という感じでしょうか。
ステッピングモーターのトルクや許容アンペア数、それに応じたステッピングモータードライバについてはデータシートなど見ながら適切なものを選んだほうがいいと思います。また電源もDC12VよりはDC24Vで充分なアンペア数のあるものを選んだほうがいいと思います。
各項目の詳細は以下に書いてあります。
追記:AliExpressでもV3.51ありました。以下。
 AliExpress.com Product - New Development Board CNC Shield V3.51 for Arduino 3D Printer Micro Controllers GRBL v0.9 Compatible Uses Pololu Drivers1958円(送料込み)
AliExpress.com Product - New Development Board CNC Shield V3.51 for Arduino 3D Printer Micro Controllers GRBL v0.9 Compatible Uses Pololu Drivers1958円(送料込み)

どうやらこのCNCシールドV3.5は、クローンがたくさん出回っているV3.0と違って、AliExpressだとここでしか扱ってないようです。PROTONEER純正品らしく値段も格安というわけではないです。もともとそんなに高いものではないですが。
実は、まだCNCシールドV3.0を使ってステッピングモーターの試運転をしてなくて、というのもジャンパーブロックを購入していなくて、マイクロステップやA端子へのクローン設定を確かめることができないでいます。
AliExpressだとジャンパーブロックが格安だけれども、こんなに要らない。100個で105円(送料無料)。ピッチは2.54mmのものを使います。

CNCシールド:A端子設定:
CNCシールドにはXYZ軸用ドライバ端子と予備のAドライバ端子(4番目のドライバ用端子)があり、基板上のピン(電源12-36V端子の上に並んでいるX,Y,Z,D12)にジャンパーブロックを差し込むことで、AをXYZのどれかのクローンに設定することができます。またXYZのクローンではなく、独立した4番目のモーターとして駆動することもできます(Arduino Uno/ATMega328にアップロードするgrbl0.9や1.1は3軸まで、Arduino Mega 2560用であれば専用の4軸ファームウェアや6軸ファームウェアがあります)。今回製作しているCNCマシンのようにY軸に2個のステッピングモーターを使っている場合は、Y軸設定をA端子にクローンすれば、二つのモーターが同じ動きになります。設定方法はこちらに書いてあります。
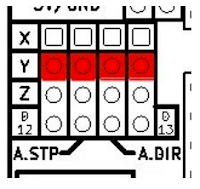
AをY軸のクローンにするなら、上記画像のように、ジャンパーブロック2個をYの欄に横一列に差し込むことになります。AをX軸のクローンにするなら、X欄に横一列に差し込む。独立した4番目のモーターとして制御するなら D12へ。説明は見当たらないですが、Aの回転を反転するには、A.DIRに差し込んだジャンパーブロックを外せばいいのかもしれません。ステッピングモーターの配線を反転させるといいようです。
 AliExpress.com Product - Free shipping! New cnc shield v3 engraving machine / 3D Printer / + 4pcs A4988 driver expansion board CNCシールドV3.0(V3.51より古いタイプ)とA4988のセットならかなり安い。456円(送料込み)。V3.0でも配線に注意すれば使えるので、低価格重視ならこれでも充分。
AliExpress.com Product - Free shipping! New cnc shield v3 engraving machine / 3D Printer / + 4pcs A4988 driver expansion board CNCシールドV3.0(V3.51より古いタイプ)とA4988のセットならかなり安い。456円(送料込み)。V3.0でも配線に注意すれば使えるので、低価格重視ならこれでも充分。
*CNCシールドV3.0とV3.1以上(最新版V3.51)の違いについてはこちらへ。
主に制御用の電気系統については以下が必要:
・grbl0.9jファームウェアをアップロードしたArduino Uno(方法はこちらへ)
・CNCシールド(CNCシールドV3.0とV3.1以上の違いに注意)
・ステッピングモータードライバ(A4988/DRV8825など)
・ステッピングモーター(各XYZ軸)
・XYZ軸用リミットスイッチ(マイクロスイッチなど)
・スピンドル用TTL端子付きドライバ(あるいはレーザー用ドライバ)
・電源(ステッピングモーター用):DC24V/5A以上
・非常停止ボタンや各種スイッチ類(要配線)
という感じでしょうか。
ステッピングモーターのトルクや許容アンペア数、それに応じたステッピングモータードライバについてはデータシートなど見ながら適切なものを選んだほうがいいと思います。また電源もDC12VよりはDC24Vで充分なアンペア数のあるものを選んだほうがいいと思います。
各項目の詳細は以下に書いてあります。
追記:AliExpressでもV3.51ありました。以下。
AliExpress.com Product - New Development Board CNC Shield V3.51 for Arduino 3D Printer Micro Controllers GRBL v0.9 Compatible Uses Pololu Drivers1958円(送料込み)

どうやらこのCNCシールドV3.5は、クローンがたくさん出回っているV3.0と違って、AliExpressだとここでしか扱ってないようです。PROTONEER純正品らしく値段も格安というわけではないです。もともとそんなに高いものではないですが。
実は、まだCNCシールドV3.0を使ってステッピングモーターの試運転をしてなくて、というのもジャンパーブロックを購入していなくて、マイクロステップやA端子へのクローン設定を確かめることができないでいます。
AliExpressだとジャンパーブロックが格安だけれども、こんなに要らない。100個で105円(送料無料)。ピッチは2.54mmのものを使います。

CNCシールド:A端子設定:
CNCシールドにはXYZ軸用ドライバ端子と予備のAドライバ端子(4番目のドライバ用端子)があり、基板上のピン(電源12-36V端子の上に並んでいるX,Y,Z,D12)にジャンパーブロックを差し込むことで、AをXYZのどれかのクローンに設定することができます。またXYZのクローンではなく、独立した4番目のモーターとして駆動することもできます(Arduino Uno/ATMega328にアップロードするgrbl0.9や1.1は3軸まで、Arduino Mega 2560用であれば専用の4軸ファームウェアや6軸ファームウェアがあります)。今回製作しているCNCマシンのようにY軸に2個のステッピングモーターを使っている場合は、Y軸設定をA端子にクローンすれば、二つのモーターが同じ動きになります。設定方法はこちらに書いてあります。

AをY軸のクローンにするなら、上記画像のように、ジャンパーブロック2個をYの欄に横一列に差し込むことになります。AをX軸のクローンにするなら、X欄に横一列に差し込む。独立した4番目のモーターとして制御するなら D12へ。説明は見当たらないですが、Aの回転を反転するには、
 AliExpress.com Product - Free shipping! New cnc shield v3 engraving machine / 3D Printer / + 4pcs A4988 driver expansion board CNCシールドV3.0(V3.51より古いタイプ)とA4988のセットならかなり安い。456円(送料込み)。V3.0でも配線に注意すれば使えるので、低価格重視ならこれでも充分。
AliExpress.com Product - Free shipping! New cnc shield v3 engraving machine / 3D Printer / + 4pcs A4988 driver expansion board CNCシールドV3.0(V3.51より古いタイプ)とA4988のセットならかなり安い。456円(送料込み)。V3.0でも配線に注意すれば使えるので、低価格重視ならこれでも充分。リミットスイッチ:
XYZ軸の両端にリミットスイッチをつけるときは、CNCシールド基板右側にあるEND STOPS:X+,X-,Y+,Y-,Z+,Z-にマイクロスイッチなどを接続(±の記号は通常、X+:右方向のリミット、X-:左方向のリミット、Y+:奥、 Y-:手前、Z+:上、Z-:下)。接続方法はこのページ下部にあります。
リミットスイッチは原則的には通常オープンのほうの端子を使います。
追記:
リミットスイッチ端子はかなりノイズに弱いようなので、コンデンサーをつけるといいみたいです(その内容はこちら)。
CNCシールドV3.0(grbl0.8ではなくgrbl0.9や1.1に使う場合)のリミットスイッチについて:
grbl0.9からは、Z軸用リミットスイッチのピンとSpindle PWMのピンの位置が入れ替わったので、それに対応していないCNCシールドV3.0(grbl0.8用)を使うときは注意が必要です。CNCシールドV3.0の場合、まだSpindle PWM端子(可変制御)ではなく、Spindle Enable端子(ON/OFF制御)になっているはずです。つまり、CNCシールドV3.0でgrbl0.9や1.1を使う場合は、Z軸用リミットスイッチ(+と-の両方)をSpindle Enable端子に接続。そのかわりSpindle Enable(PWM端子として)は、Z+かZ-のどちらかへ接続。CNCシールドV3.0上のZ+とZ-は内部でパラレルにつながれているので、どちらにつないでもいいはずです。
*CNCシールドV3.0とV3.1以上(最新版V3.51)の違いについてはこちらへ。
CNCシールド3.10以降であればgrbl0.9や1.1に対応しているので、ピンの配置はそのままのはずです。
CNCシールド上の各リミットスイッチ端子(2本ずつ)は、普段オープンな状態になっており、内部のプルアップ抵抗により一方の端子(内側の端子)がHIGH(5V)の状態になっています。リミットスイッチが押されるともう一本の外側のGND端子と接続されるためにLOW(0V)になり反応したということになるようです。
CNCシールドV3.0.2からは、リミットスイッチが押されたときにLOWになるかHIGHになるかを選択できる端子(END STOP HIGH/LOWの横にならんだ3本ピン)があります。デフォルトでは、3本ピンの左と真ん中にジャンパブロックを差し込む。逆の設定にしたい場合は、真ん中と右に差し込む。
ドライバ(A4988/DRV8825)の設定:
ドライバは、CNCシールドにただ差し込んで終わりというわけではなく、
・ヒートシンクをつける
・マイクロステッピング設定をする
・電流制限設定をする
ということが必要です(以下に説明)。
まずCNCシールドにドライバを差し込むときは、向きに注意しないといけません。

また、DRV8825なら以下のような向き。A4988と違って可変抵抗器が上にくるように差し込みます。DRV8825はヒートシンクなしで1.5A、ヒートシンクありで2.5A。


マイクロステッピング設定方法:
ドライバを差し込むと見えなくなってしまいますが、ドライバのちょうど真下にジャンパーブロック(ジャンパーピン)を縦に3個差し込む端子MS1、MS2、MS3があります。以下の赤枠で囲んだ部分。

ジャンパーブロックの差し込む組み合わせによってマイクロステッピングをFull Step(1/1)、 Half Step(1/2)、1/4、1/8、1/16から選ぶことができます。Low:差し込まない、High:差し込む。
最高1/16までできるのがA4988(以下)。Pololuのサイトの書いてあります。
| MS1 | MS2 | MS3 | Microstep Resolution |
|---|---|---|---|
| Low | Low | Low | Full step |
| High | Low | Low | Half step |
| Low | High | Low | Quarter step |
| High | High | Low | Eighth step |
| High | High | High | Sixteenth step |
つまりマイクロステッピングされないまま、1回転200ステップのモーターなら200ステップのまま。
また、DRV8825なら1/32まで設定できます(とは言っても、1/32は使わないと思うけど)。
現状では、DRV8825でマイクロステッピング1/8に設定しています。
3つさせば、200x16=3200で1回転で3200ステップのきめ細かさになります。細かくすればするほど動きは滑らかになって振動が減りますが、トルクが下がってしまうようです。
また、DRV8825なら1/32まで設定できます(とは言っても、1/32は使わないと思うけど)。
現状では、DRV8825でマイクロステッピング1/8に設定しています。
DRV8825についてのPololuサイト。
電流制限設定:
 上の図面で、右下に見える配線図にどの線が何色かが書いてあります。
上の図面で、右下に見える配線図にどの線が何色かが書いてあります。
これを見ながらA4988の場合なら、以下の配線になります。
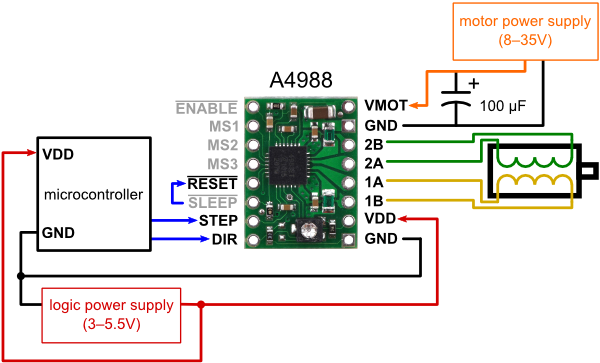 モーターは右側の端子、2B、2A、1A、1Bの4本に接続されています。ということは、先ほどのモーターの図面を参照すると、
モーターは右側の端子、2B、2A、1A、1Bの4本に接続されています。ということは、先ほどのモーターの図面を参照すると、
2B-BLK(黒)
2A-GRN(緑)
1A-RED(赤)
1B-BLU(青)
という対応になります。CNCシールドの各ドライバの右側に4つのピンが縦についており、そのまま上から、黒、緑、赤、青という配線でこのモーターの場合つなぎます。
モーターのYEL(黄)とWHT(白)は未接続で構いません。
DRV8825の場合は以下。
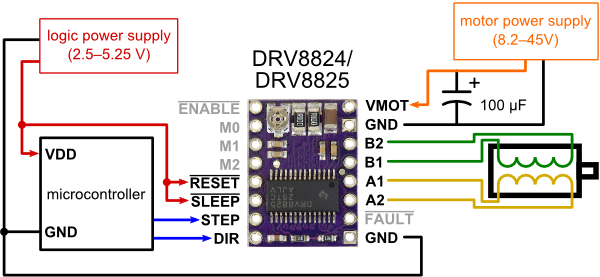 B2-BLK(黒)
B2-BLK(黒)
B1-GRN(緑)
A1-RED(赤)
A2-BLU(青)
となります。
A4988とピンの番号が微妙に違うので、間違わないようにしてください(上からの順番は同じ)。
それと、モーターの線の色については、そのモーターのデータシートを探し出して確認したほうがいいと思います。ドライバA4988/DRV8825のピンに関しては、裏返すとシルクで書いてあるので、ドライバの差し込む向きを確認する場合やモーターと接続する場合、どの端子なのか実際に見て確認できます。
CNCシールドのモーター接続のピンは、ドライバのピンをそのまま右へ平行移動した4つのピンになっているはずです。
という感じで準備は整っているのですが、肝心のジャンパーブロックがまだない。CNCマシンの配線作業する段階になったときに、秋葉原に行ってケーブル、コネクター類といっしょに手に入れようと思ってます。
基本的な配線の仕方(CNCシールドV3.5の場合):
*CNCシールドV3.0の場合は、SpnEn端子とZ軸リミットスイッチ端子を入れ替えて接続(詳細はこちらへ)
左下の青い端子にステッピングモーター用の電源、そして各軸ステッピングモーター、各軸リミットスイッチ、可変出力可能なTTL端子つきのスピンドル用モータードライバ(あるいはレーザー用ドライバ)を接続。下画像には、ステッピングモータードライバは搭載されていないので、A4988やDRV8825をマウントして下さい。

この画像の場合、Y軸に2個のモーターを使う設定なので、4つのステッピングモータードライバを搭載します。右下のステッピングモータードライバ用の端子(A端子)がY軸用のクローンです。その設定のため、左側に緑色の枠で示したジャンパブロックを2個(Y軸用)を差し込みます(写真上のX軸用の黒いジャンパーブロック2個は差し込まない)。3個しかモーターを使わないのであれば、A端子そして左側のクローン用のジャンパブロックも不要です。
*ステッピングモーターの各線の色はモーターによって違う場合があるので注意して下さい。
各軸ドライバ用端子の間(電解コンデンサの下)には、写真上ではマイクロステップ設定用のジャンパブロックが縦に3個ずつ差し込んでありますが、マイクロステップをいくつに設定するかは、前述してある内容を確認して必要数差し込んで下さい。
リミットスイッチは、XYZ軸に2個ずつあるため12本の線が必要ですが、各軸+と-は回路内で並列つなぎになっているため、配線をまとめてしまえば4本で済みます(黒い端子はGNDなので、6本ある線を1本にまとめ、各軸ごとの赤い線は1本ずつ合計3本にまとめることができます)。もし長い距離を配線しなければいけないときは、途中でまとめてしまったほうがいいかもしれません。
スピンドル用のドライバ(TTL端子)をSpnEn(pwm)に接続することで、Gコードでスピンドルの出力調整が可能になりますが、スピンドルを手動制御するなら接続する必要はありません。
このほか、プローブ機能、非常停止(デジタルブレーカー)など、いくつか端子は余っていますが、最低限これだけをつなげば動かすことはできます。動作確認後、あとからそのような機能を追加配線していってもいいと思います。ステッピングモーターの回転方向やスピード(フィード)は、ソフトで設定可能です。
このCNCシールドの真下にくるArduinoボード自体は、通常パソコンとUSB接続されるために、USB経由でDC5Vが供給されます。もし、ワイヤレスなどスタンドアロンで動かす場合は、Arduinoボードに電力を供給する電源が別途必要になります。
電源について:
ステッピングモーターは前述してあるNEMA23(3.6V/2.0A)を4個使用しており、現在DC24V/7Aのスイッチング電源(AC100V用)に接続しています。
ShapeOko Wikiには電源について書いてあり、NEMA17クラス4個であれば100から120W程度、NEMA23クラス4個であれば150〜200W。
参考までに、ShapeOko3ではNEMA23クラス4個使用に対して、24V/5Aの電源を用いているようです。最近のX-CARVEでは、NEMA23クラス(140oz-in)4個に対して24V/17A。
| MODE0 | MODE1 | MODE2 | Microstep Resolution |
|---|---|---|---|
| Low | Low | Low | Full step |
| High | Low | Low | Half step |
| Low | High | Low | 1/4 step |
| High | High | Low | 1/8 step |
| Low | Low | High | 1/16 step |
| High | Low | High | 1/32 step |
| Low | High | High | 1/32 step |
| High | High | High | 1/32 step |
電流制限設定:
ステップ数をあげるとより多くの電流が流れるため、モーターにとって過電流になりダメージを与えることがあります。そうならないように電流制限する機能がドライバについています。ドライバ基板上の可変抵抗器で調節可能です(電流というか電圧を調整するのですが)。以下、Pololuのセッティング動画。
まずマイクロステップ設定をフルステップの状態(ジャンパーブロックをなにも差し込まない)で、
モーターの許容電流値が1Aなら、
A4988の場合、
Current Limit=VREF x 2.5
モーターの許容電流が1A=VREF x 2.5なので、 VREF=0.4Vとなります。可変抵抗器を回して、0.4V以下になるように設定すればいいことになります。
その際テスターで電圧を計測します。ドライバ基板の右下のGND端子(以下のステッピングモーターとの配線画像を見るとGNDの位置が分かります)にテスターのマイナスプローブ、そしてテスターのプラスプローブを可変抵抗器の回す部分(もしくは可変抵抗器の3つ脚の真ん中の端子)に接続。ゆっくり可変抵抗器を回しながら、1Aのモーターなら0.4Vくらいになるようにします (下の画像のような2Aのモーターなら0.8V)。A4988の場合は、CNCシールドに差し込みパソコンにUSB接続で電源供給し調整できました。
追記(2017年以降):
PololuのA4988のサイトを見ると、従来の電流制限設定の計算式は
Current Limit=VREF x 2.5
でしたが、2017年以降のPololu製A4988ボードでは、センスレジスタが0.050Ωから0.068Ωへ改良されたために、計算式は
となったようです。
Rcsの部分が、センスレジスタの値(従来の0.050か2017年製の0.068か)であり、
従来の計算式にRcsを代入すれば、
Vref=8×Imax×0.050=Imax×0.4
となるので、結果的には、
Current Limit=VREF x 2.5(従来の計算式)
と同じ値になるというわけです。
新しい計算式は、Pololu製の2017年製のA4988ボードを使った場合適用されるので、中国製のA4988の場合は、おそらく従来の計算式のままで大丈夫だと思います。
DRV8825の場合、
追記(2017年以降):
PololuのA4988のサイトを見ると、従来の電流制限設定の計算式は
Current Limit=VREF x 2.5
でしたが、2017年以降のPololu製A4988ボードでは、センスレジスタが0.050Ωから0.068Ωへ改良されたために、計算式は
となったようです。
Rcsの部分が、センスレジスタの値(従来の0.050か2017年製の0.068か)であり、
従来の計算式にRcsを代入すれば、
Vref=8×Imax×0.050=Imax×0.4
となるので、結果的には、
Current Limit=VREF x 2.5(従来の計算式)
と同じ値になるというわけです。
新しい計算式は、Pololu製の2017年製のA4988ボードを使った場合適用されるので、中国製のA4988の場合は、おそらく従来の計算式のままで大丈夫だと思います。
DRV8825の場合、
Current Limit=VREF x 2.0
なので、1Aのモーターなら0.5V、2Aのモーターなら1.0Vになるように可変抵抗器を回します。
DRV8825の場合、パソコンとのUSB接続だけではダメで、CNCシールドの12-36Vに電源供給しないとできませんでした。
追記:
RepRapの電流制限のページを見ると、A4988やDRV8825ドライバーのチョッピング機能により上記のように電流制限すれば、例えばInventablesで売っている2.8AのNEMA23モーターも駆動可能。2.8Aの場合、A4988ならVREF=2.5/2.8=0.89V以下に可変抵抗器を設定すれば、最大トルクは得られないけれども大丈夫らしいです。Inventables NEMA23 2.8Aのページの質問(2013/DEC/10)で、GrblShield2.0Aでこのモーターは使えるのか?というのがあり、最大トルクは得られないけれども一応使えると書いてある。
関連:Shapeoko Wikiのドライバのページ
DRV8825の場合、パソコンとのUSB接続だけではダメで、CNCシールドの12-36Vに電源供給しないとできませんでした。
追記:
RepRapの電流制限のページを見ると、A4988やDRV8825ドライバーのチョッピング機能により上記のように電流制限すれば、例えばInventablesで売っている2.8AのNEMA23モーターも駆動可能。2.8Aの場合、A4988ならVREF=2.5/2.8=0.89V以下に可変抵抗器を設定すれば、最大トルクは得られないけれども大丈夫らしいです。Inventables NEMA23 2.8Aのページの質問(2013/DEC/10)で、GrblShield2.0Aでこのモーターは使えるのか?というのがあり、最大トルクは得られないけれども一応使えると書いてある。
関連:Shapeoko Wikiのドライバのページ
ステッピングモーターとの配線:
モーターによっては線の色が違う場合があるので、データシートなどでチェックして、どの色がどの線なのか確認したほうがいいと思います。また、ステッピングモーターには4線、6線、8線などあります。PololuのFaqにそれぞれの接続の仕方が書いてあります。
以下は、今使っているモーター(2相ユニポーラ6線)です。
定格3.6V/2.0A、3.6V与えると2.0A電流が流れるということなので、ドライバDRV8825で2Aの電流制限をしたということは3.6Vで駆動することになります。
以下は、今使っているモーター(2相ユニポーラ6線)です。
定格3.6V/2.0A、3.6V与えると2.0A電流が流れるということなので、ドライバDRV8825で2Aの電流制限をしたということは3.6Vで駆動することになります。

これを見ながらA4988の場合なら、以下の配線になります。
モーターは右側の端子、2B、2A、1A、1Bの4本に接続されています。ということは、先ほどのモーターの図面を参照すると、2B-BLK(黒)
2A-GRN(緑)
1A-RED(赤)
1B-BLU(青)
という対応になります。CNCシールドの各ドライバの右側に4つのピンが縦についており、そのまま上から、黒、緑、赤、青という配線でこのモーターの場合つなぎます。
モーターのYEL(黄)とWHT(白)は未接続で構いません。
DRV8825の場合は以下。
B2-BLK(黒)B1-GRN(緑)
A1-RED(赤)
A2-BLU(青)
となります。
A4988とピンの番号が微妙に違うので、間違わないようにしてください(上からの順番は同じ)。
それと、モーターの線の色については、そのモーターのデータシートを探し出して確認したほうがいいと思います。ドライバA4988/DRV8825のピンに関しては、裏返すとシルクで書いてあるので、ドライバの差し込む向きを確認する場合やモーターと接続する場合、どの端子なのか実際に見て確認できます。
CNCシールドのモーター接続のピンは、ドライバのピンをそのまま右へ平行移動した4つのピンになっているはずです。
という感じで準備は整っているのですが、肝心のジャンパーブロックがまだない。CNCマシンの配線作業する段階になったときに、秋葉原に行ってケーブル、コネクター類といっしょに手に入れようと思ってます。
基本的な配線の仕方(CNCシールドV3.5の場合):
*CNCシールドV3.0の場合は、SpnEn端子とZ軸リミットスイッチ端子を入れ替えて接続(詳細はこちらへ)

この画像の場合、Y軸に2個のモーターを使う設定なので、4つのステッピングモータードライバを搭載します。右下のステッピングモータードライバ用の端子(A端子)がY軸用のクローンです。その設定のため、左側に緑色の枠で示したジャンパブロックを2個(Y軸用)を差し込みます(写真上のX軸用の黒いジャンパーブロック2個は差し込まない)。3個しかモーターを使わないのであれば、A端子そして左側のクローン用のジャンパブロックも不要です。
*ステッピングモーターの各線の色はモーターによって違う場合があるので注意して下さい。
各軸ドライバ用端子の間(電解コンデンサの下)には、写真上ではマイクロステップ設定用のジャンパブロックが縦に3個ずつ差し込んでありますが、マイクロステップをいくつに設定するかは、前述してある内容を確認して必要数差し込んで下さい。
リミットスイッチは、XYZ軸に2個ずつあるため12本の線が必要ですが、各軸+と-は回路内で並列つなぎになっているため、配線をまとめてしまえば4本で済みます(黒い端子はGNDなので、6本ある線を1本にまとめ、各軸ごとの赤い線は1本ずつ合計3本にまとめることができます)。もし長い距離を配線しなければいけないときは、途中でまとめてしまったほうがいいかもしれません。
スピンドル用のドライバ(TTL端子)をSpnEn(pwm)に接続することで、Gコードでスピンドルの出力調整が可能になりますが、スピンドルを手動制御するなら接続する必要はありません。
このほか、プローブ機能、非常停止(デジタルブレーカー)など、いくつか端子は余っていますが、最低限これだけをつなげば動かすことはできます。動作確認後、あとからそのような機能を追加配線していってもいいと思います。ステッピングモーターの回転方向やスピード(フィード)は、ソフトで設定可能です。
このCNCシールドの真下にくるArduinoボード自体は、通常パソコンとUSB接続されるために、USB経由でDC5Vが供給されます。もし、ワイヤレスなどスタンドアロンで動かす場合は、Arduinoボードに電力を供給する電源が別途必要になります。
電源について:
ステッピングモーターは前述してあるNEMA23(3.6V/2.0A)を4個使用しており、現在DC24V/7Aのスイッチング電源(AC100V用)に接続しています。
ShapeOko Wikiには電源について書いてあり、NEMA17クラス4個であれば100から120W程度、NEMA23クラス4個であれば150〜200W。
参考までに、ShapeOko3ではNEMA23クラス4個使用に対して、24V/5Aの電源を用いているようです。最近のX-CARVEでは、NEMA23クラス(140oz-in)4個に対して24V/17A。




